

Mit der Pulsweitenmodulation lässt sich die Motorleistung eines Motors in Verbindung mit einem L293D oder L298N sehr gut steuern. Dabei wird der Motor 1000 mal pro Sekunde ein und wieder ausgeschaltet. Je länger das Zeitintervall, in dem der Motor eingeschaltet ist, desto größer ist die durchschnittliche Motorleistung.
Beim Arduino Nano sind die Pins D3, D5, D6, D9, D10 und D11 sogenannte PWM-Pins. Sie sind im Pinout mit einer Schlangenlinie gekennzeichnet.
Der PWM-Pin muss beispielsweise in der setup()-Methode mit pinMode(PWM-Pin,OUTPUT); auf OUTPUT gesetzt werden.
Im Programm kann man dann mit analogWrite(Pin,Leistung) das PWM-Signal auf dem PWM-Pin steuern. Mögliche Werte für die Leistung sind 0 (Motor ausgeschaltet) bis 255 (Motor immer eingeschaltet).
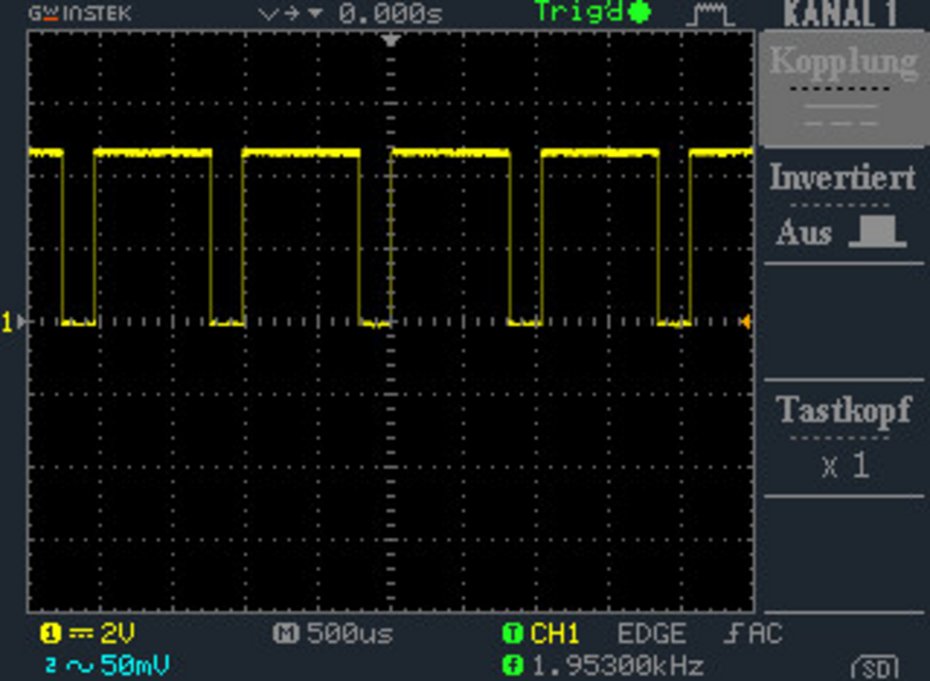
Unten sieht man die Zeit-Spannungskurve des D6-Pins nach dem Befehl analogWrite(D6,200);